


Somos um dos fornecedores mais profissionais de automação industrial (FA) da China. Nossos principais produtos incluem servomotores, redutores planetários, inversores, CLPs e IHMs. Trabalhamos com marcas como Panasonic, Mitsubishi, Yaskawa, Delta, TECO, Sanyo Denki, Scheider, Siemens, Omron, entre outras. Prazo de entrega: 3 a 5 dias úteis após o recebimento do pagamento. Formas de pagamento: T/T, L/C, PayPal, Western Union, Alipay, WeChat, etc.
Detalhes da especificação
| Item | Especificações |
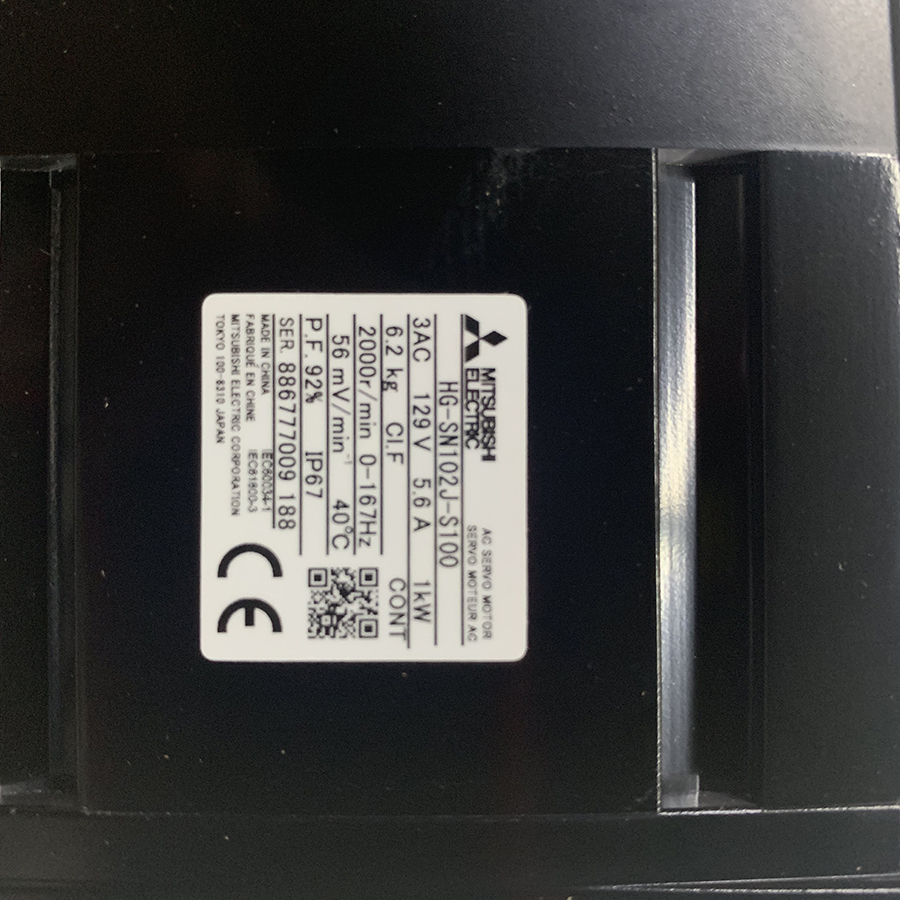
| Modelo | HG-SN102J-S100 |
| Marca | Mitsubishi |
| Nome do produto | Servomotor CA |
| Poder | 5,0 kW |
| Tensão | 400V |
| Freqüência | 900 (kHz) |
| Série de produtos / nome da família | Série MELSERVO JE |
| Corrente nominal | 5.6A |
| Potência ativa nominal | 1000W / 1kW |
| Grau de proteção | IP67 |
| Corrente máxima | 17 A |
| Carga radial máxima | 980 N |
| Carga axial máxima | 490 N |
| Torque nominal | 4,77 Nm |
| Torque máximo | 14,3 Nm |
| Resolução | 17 bits |
| Tamanho | 130 mm x 130 mm x 132,5 mm |
| Peso líquido | 6,2 kg |
Um sinal CA constante é fornecido como entrada para o enrolamento principal do estator. No entanto, como o nome sugere, o enrolamento de controle recebe uma tensão de controle variável. Essa tensão de controle variável é obtida do servoamplificador. É importante observar que, para haver um campo magnético rotativo, a tensão aplicada ao enrolamento de controle deve estar defasada em 90° em relação à tensão CA de entrada.
Rotor: O rotor é geralmente de dois tipos; um é do tipo gaiola de esquilo, enquanto o outro é do tipo copo de arrasto.
O rotor do tipo gaiola de esquilo é mostrado abaixo: rotor de gaiola de esquilo. Neste tipo de rotor, o comprimento é grande enquanto o diâmetro é pequeno e é construído com condutores de alumínio, portanto, pesa menos. Deve-se notar aqui que as características de torque-velocidade de um motor de indução normal têm regiões de inclinação positiva e negativa que representam regiões instáveis e estáveis, respectivamente.
No entanto, os servomotores CA são projetados para possuírem alta estabilidade; portanto, suas características de torque-deslizamento não devem apresentar uma região de deslizamento positivo. Além disso, o torque desenvolvido no motor deve diminuir linearmente com a velocidade.
Para alcançar esse objetivo, a resistência do circuito do rotor deve ter um valor elevado, com baixa inércia. Por essa razão, durante a construção do rotor, a relação entre diâmetro e comprimento é mantida pequena. Os entreferros reduzidos entre as barras de alumínio no motor de gaiola de esquilo facilitam a redução da corrente de magnetização.
Sobre a Série J4 da Mitsubishi:
Para atender a uma gama crescente de aplicações, incluindo fabricação de semicondutores e LCDs, robôs e máquinas de processamento de alimentos, o MELSERVO-J4 se integra a outras linhas de produtos da Mitsubishi Electric, como controladores de movimento, redes, terminais de operação gráfica, controladores programáveis e muito mais. Isso oferece a liberdade e a flexibilidade necessárias para criar um sistema servo mais avançado.
-Sobre a Série J5 da Mitsubishi:
(1) Progressividade
Para a evolução das máquinas
Melhoria de desempenho
Padronização do programa
(2)Conectividade
Para sistemas flexíveis
Configurações
Integração com dispositivos conectáveis
(3) Usabilidade
Para início de operação rápido
Aprimoramento da ferramenta
Usabilidade aprimorada do sistema de acionamento
(4) Manutenibilidade
Para detecção rápida e
diagnóstico de falhas
Manutenção preditiva/preventiva
Manutenção corretiva
(5)Patrimônio
Para utilização dos recursos existentes
(6)dispositivos
Intercambiabilidade com versões anteriores.
(7) modelos de geração
-Sobre a Série JET da Mitsubishi
-Sobre a Série JE Mitsubishi
-Sobre a Série JN Mitsubishi
-

MR-J2S-70B-PY135U054 Acionador Mitsubishi para servo...
-

Driver de amplificador Mitsubishi original MR-J3-100B
-

Servomotor Mitsubishi HF-KR13BJ (Japão)
-

Servo driver Mitsubishi novo e original do Japão...
-

Servoacionador Mitsubishi Japão MR-JE-100A
-

Servo de acionamento CA do motor Mitsubishi MR-J2S-60A4




